











































































Manipulator (M)
Remote arm with tools to support safe access and manipulation of explosive hazards

Hydraulic tool‑change system supporting rapid, remote exchange of front‑end tools for different operational tasks.
Exposing, manipulating and relocating of suspect items from stand-off, reducing operator exposure.
Designed to support stand-off access and manipulation in explosive threat environments, the GCS Manipulator supports EOD, IEDD and clearance-support operations from a safer distance.
Mounted on GCS unmanned platforms and operated remotely, it supports inspection, exposure and controlled handling of suspect items from cover. The Manipulator combines reach, controlled lifting and modular tool use to support tasks such as exposure of suspect buried items, remote manipulation during route and area-clearance support, and selected engineering activities, while reducing operator exposure.
Designed to support stand-off access and manipulation in explosive threat environments, the GCS Manipulator supports EOD, IEDD and clearance-support operations from a safer distance.
Mounted on GCS unmanned platforms and operated remotely, it supports inspection, exposure and controlled handling of suspect items from cover. The Manipulator combines reach, controlled lifting and modular tool use to support tasks such as exposure of suspect buried items, remote manipulation during route and area-clearance support, and selected engineering activities, while reducing operator exposure.
Designed to support stand-off access and manipulation in explosive threat environments, the GCS Manipulator supports EOD, IEDD and clearance-support operations from a safer distance.
Mounted on GCS unmanned platforms and operated remotely, it supports inspection, exposure and controlled handling of suspect items from cover. The Manipulator combines reach, controlled lifting and modular tool use to support tasks such as exposure of suspect buried items, remote manipulation during route and area-clearance support, and selected engineering activities, while reducing operator exposure.
Designed to support stand-off access and manipulation in explosive threat environments, the GCS Manipulator supports EOD, IEDD and clearance-support operations from a safer distance.
Mounted on GCS unmanned platforms and operated remotely, it supports inspection, exposure and controlled handling of suspect items from cover. The Manipulator combines reach, controlled lifting and modular tool use to support tasks such as exposure of suspect buried items, remote manipulation during route and area-clearance support, and selected engineering activities, while reducing operator exposure.

Explore our range of products
The Manipulator comes in two variants, matched to the size, power and operational role of their host platforms.

M‑100
The M-100 is a compact manipulator arm designed for the GCS-100 platform, supporting EOD, IEDD and route clearance support tasks.

M‑200
The M-200 is a heavy-duty manipulator arm designed for the GCS-200 platform in EOD, IEDD and route clearance configurations.
Built for operational deployment
01
Remote handling support
Supports exposure, manipulation and, where appropriate, relocation of suspect items from stand-off, reducing operator exposure during EOD, Route Clearance and area clearance support tasks.
02
Modular tool interface
Hydraulic tool‑change system supports rapid, remote exchange of front‑end tools, allowing the manipulator to be adapted to different operational tasks without manual intervention in the hazard area.
03
Designed for harsh operational environments
In‑house GCS design focused on durability, maintainability and field reliability across repeated heavy‑duty operations.
04
Integrated camera support
Multiple arm-mounted cameras provide different viewing angles for precise remote operation, supporting detailed inspection and controlled movements.
05
Extended reach & lifting capacity
Provides significant working envelope for tasks such as deep excavation, trenching and handling of heavy objects from cover.
06
Fully remote‑controlled operation
Manipulator functions are operated via the GCS remote-control architecture, supporting separation between operator and hazard.
Built for operational deployment
01
Remote handling support
Supports exposure, manipulation and, where appropriate, relocation of suspect items from stand-off, reducing operator exposure during EOD, Route Clearance and area clearance support tasks.
02
Modular tool interface
Hydraulic tool‑change system supports rapid, remote exchange of front‑end tools, allowing the manipulator to be adapted to different operational tasks without manual intervention in the hazard area.
03
Designed for harsh operational environments
In‑house GCS design focused on durability, maintainability and field reliability across repeated heavy‑duty operations.
04
Integrated camera support
Multiple arm-mounted cameras provide different viewing angles for precise remote operation, supporting detailed inspection and controlled movements.
05
Extended reach & lifting capacity
Provides significant working envelope for tasks such as deep excavation, trenching and handling of heavy objects from cover.
06
Fully remote‑controlled operation
Manipulator functions are operated via the GCS remote-control architecture, supporting separation between operator and hazard.
Built for operational deployment
01
Remote handling support
Supports exposure, manipulation and, where appropriate, relocation of suspect items from stand-off, reducing operator exposure during EOD, Route Clearance and area clearance support tasks.
02
Modular tool interface
Hydraulic tool‑change system supports rapid, remote exchange of front‑end tools, allowing the manipulator to be adapted to different operational tasks without manual intervention in the hazard area.
03
Designed for harsh operational environments
In‑house GCS design focused on durability, maintainability and field reliability across repeated heavy‑duty operations.
04
Integrated camera support
Multiple arm-mounted cameras provide different viewing angles for precise remote operation, supporting detailed inspection and controlled movements.
05
Extended reach & lifting capacity
Provides significant working envelope for tasks such as deep excavation, trenching and handling of heavy objects from cover.
06
Fully remote‑controlled operation
Manipulator functions are operated via the GCS remote-control architecture, supporting separation between operator and hazard.
Built for operational deployment
01
Remote handling support
Supports exposure, manipulation and, where appropriate, relocation of suspect items from stand-off, reducing operator exposure during EOD, Route Clearance and area clearance support tasks.
02
Modular tool interface
Hydraulic tool‑change system supports rapid, remote exchange of front‑end tools, allowing the manipulator to be adapted to different operational tasks without manual intervention in the hazard area.
03
Designed for harsh operational environments
In‑house GCS design focused on durability, maintainability and field reliability across repeated heavy‑duty operations.
04
Integrated camera support
Multiple arm-mounted cameras provide different viewing angles for precise remote operation, supporting detailed inspection and controlled movements.
05
Extended reach & lifting capacity
Provides significant working envelope for tasks such as deep excavation, trenching and handling of heavy objects from cover.
06
Fully remote‑controlled operation
Manipulator functions are operated via the GCS remote-control architecture, supporting separation between operator and hazard.

Operational specifications
M‑100
4,500 mm
maximum horizontal reach
5,100 mm
maximum working height
1,680 mm
digging depth
4,120 nm
digging force
Up to
900 kg
lifting capacity
Remote‑controlled
operation via GCS-100 platform integration
M‑200
7,350 mm
maximum horizontal reach
8,020 mm
maximum working height
5,000 mm
digging depth
1,800 nm
digging force
Up to
3,000 kg
lifting capacity
Remote‑controlled
operation via GCS-200 platforms integration
Capabilities this platform supports
Capabilities this platform supports
Capabilities this platform supports
Capabilities this platform supports

Explosive Ordnance Disposal (EOD)
Managing explosive ordnance hazards that block recovery, operations and access

IEDD & Search
Managing improvised explosive threats that block access, movement and recovery

Route Clearance
Restoring controlled movement along critical routes affected by explosive threats

Urban Clearance
Restoring controlled access and functionality in explosive‑contaminated urban environments

Battle Area Clearance
Restoring controlled land use across former battle areas contaminated by explosive ordnance

Combat Engineering
Shaping battlefield environments to support mobility, protection and control in high-threat environments
Explosive Ordnance Disposal (EOD)
Managing explosive ordnance hazards that block recovery, operations and access
IEDD & Search
Managing improvised explosive threats that block access, movement and recovery
Route Clearance
Restoring controlled movement along critical routes affected by explosive threats
Urban Clearance
Restoring controlled access and functionality in explosive‑contaminated urban environments
Battle Area Clearance
Restoring controlled land use across former battle areas contaminated by explosive ordnance
Combat Engineering
Shaping battlefield environments to support mobility, protection and control in high-threat environments
Explosive Ordnance Disposal (EOD)
Managing explosive ordnance hazards that block recovery, operations and access
IEDD & Search
Managing improvised explosive threats that block access, movement and recovery
Route Clearance
Restoring controlled movement along critical routes affected by explosive threats
Urban Clearance
Restoring controlled access and functionality in explosive‑contaminated urban environments
Battle Area Clearance
Restoring controlled land use across former battle areas contaminated by explosive ordnance
Combat Engineering
Shaping battlefield environments to support mobility, protection and control in high-threat environments
Explosive Ordnance Disposal (EOD)
Managing explosive ordnance hazards that block recovery, operations and access
IEDD & Search
Managing improvised explosive threats that block access, movement and recovery
Route Clearance
Restoring controlled movement along critical routes affected by explosive threats
Urban Clearance
Restoring controlled access and functionality in explosive‑contaminated urban environments
Battle Area Clearance
Restoring controlled land use across former battle areas contaminated by explosive ordnance
Combat Engineering
Shaping battlefield environments to support mobility, protection and control in high-threat environments
Related mission package components
The Manipulator is part of GCS’ integrated solution ecosystem, combining hardware, attachments, training and support to enable safe and sustainable operations.
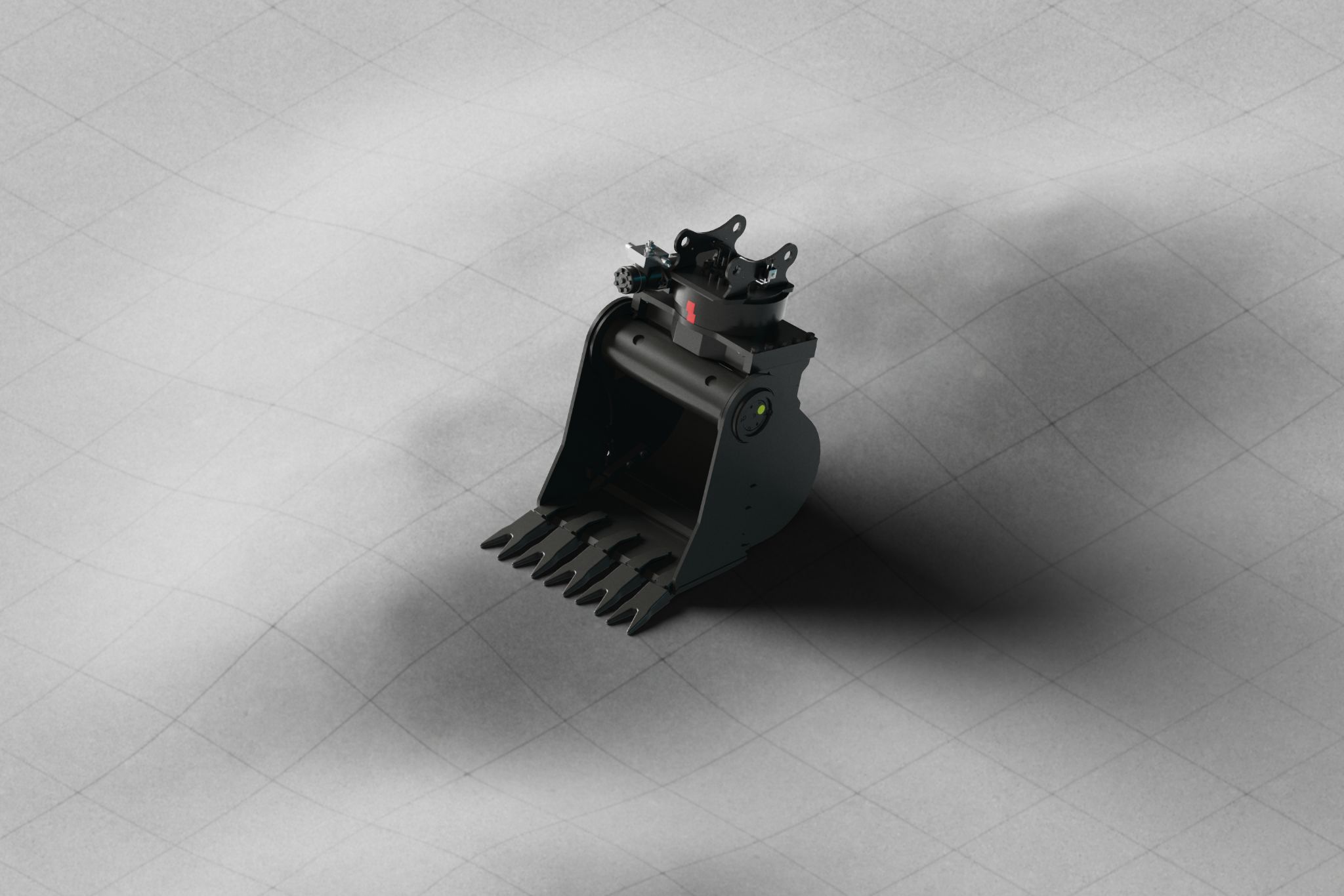
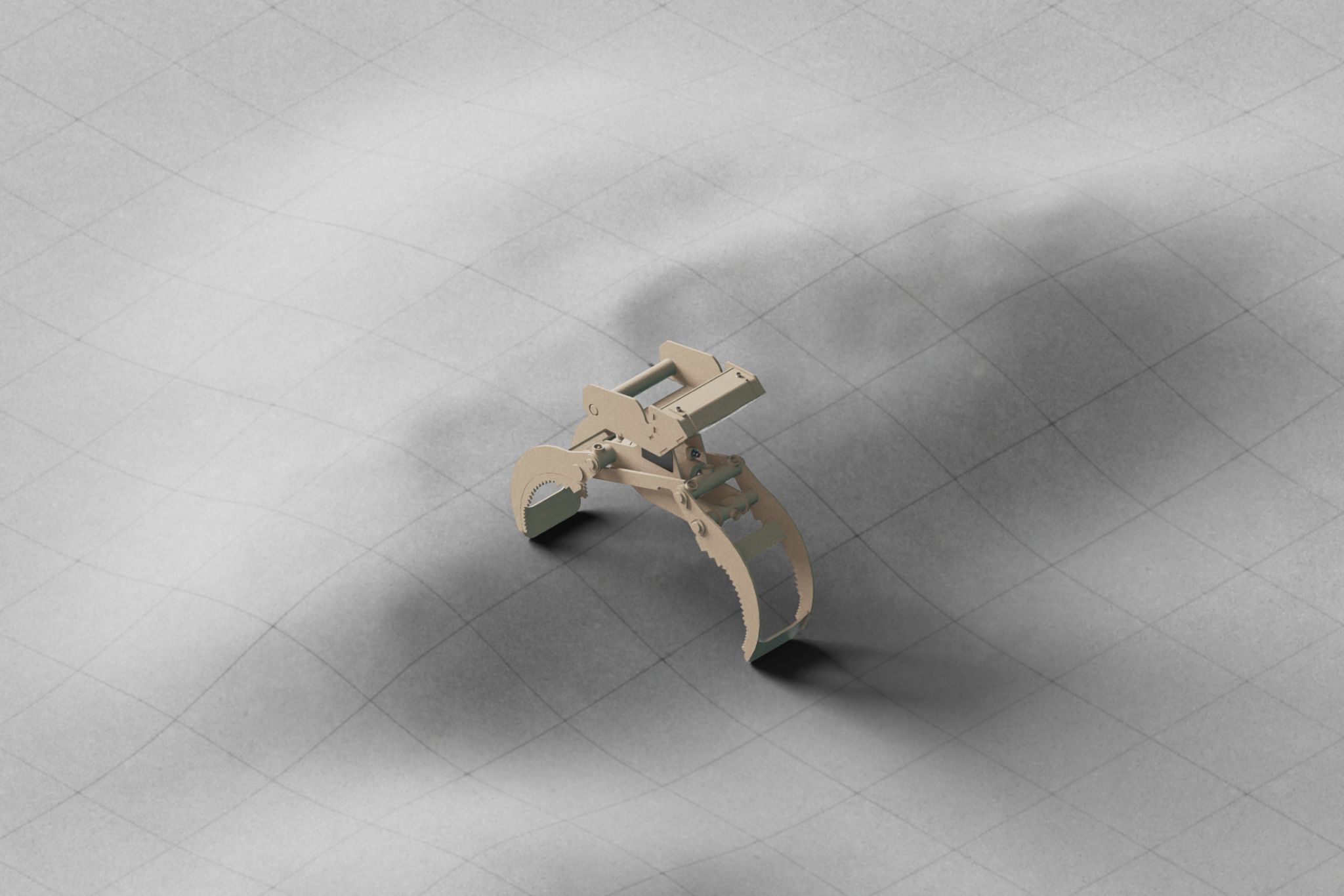
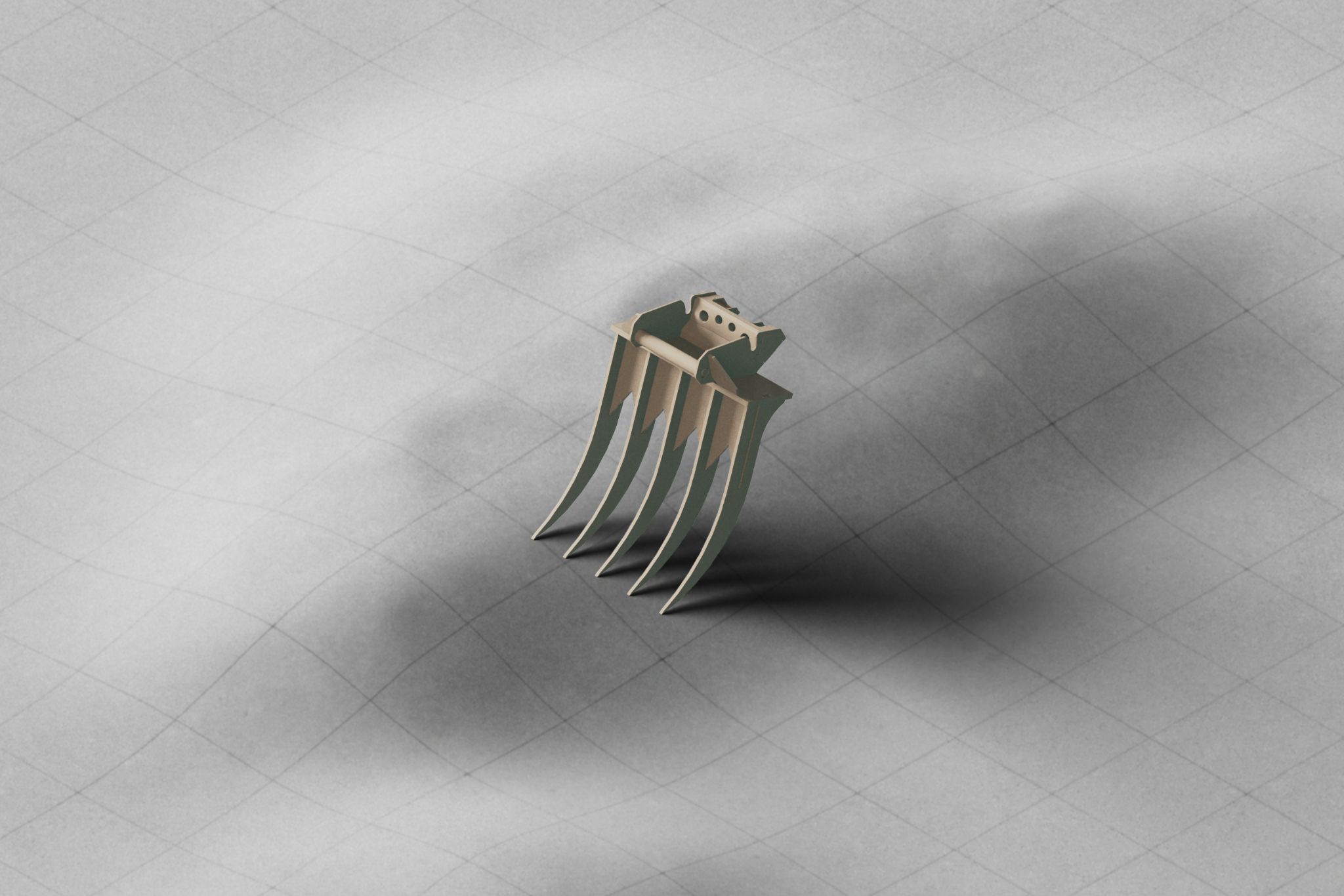
Manipulator Tools



Unmanned Platforms


Operational Support



Related mission package components
The Manipulator is part of GCS’ integrated solution ecosystem, combining hardware, attachments, training and support to enable safe and sustainable operations.
Manipulator Tools
Unmanned Platforms
Operational Support
Related mission package components
The Manipulator is part of GCS’ integrated solution ecosystem, combining hardware, attachments, training and support to enable safe and sustainable operations.
Manipulator Tools
Unmanned Platforms
Operational Support
Related mission package components
The Manipulator is part of GCS’ integrated solution ecosystem, combining hardware, attachments, training and support to enable safe and sustainable operations.
Manipulator Tools
Unmanned Platforms
Operational Support
Operational experience from the field, across contexts and missions.
Operational experience from the field, across contexts and missions.
Operational experience from the field, across contexts and missions.
Operational experience from the field, across contexts and missions.



For similar operational needs
For similar operational needs
For similar operational needs
For similar operational needs







Configure the right system for your task
GCS helps define the right platform, attachments, sensors and support package based on threat type, terrain and mission requirements.
Configure the right system for your task
GCS helps define the right platform, attachments, sensors and support package based on threat type, terrain and mission requirements.
Configure the right system for your task
GCS helps define the right platform, attachments, sensors and support package based on threat type, terrain and mission requirements.
Configure the right system for your task
GCS helps define the right platform, attachments, sensors and support package based on threat type, terrain and mission requirements.
Manipulator (M)
Manipulator (M)
Manipulator (M)
Manipulator (M)
Remote arm with tools to support safe access and manipulation of explosive hazards
